
Poziționare smartphone în medii urbane cu GNSS și hărți 3D
Noua cercetare a echipei de la China University of Mining and Technology și Shandong Jianzhu University propune un cadru de poziționare smartphone care îmbină GNSS, carrier phase și hărți 3D pentru a îmbunătăți acuratețea în orașe dense. Articolul publicat în 2025 (doi:10.1186/s43020-025-00185-6) prezintă o metodă bazată pe factor graph, menită să depășească limitările tradiționale ale GNSS pe smartphone.
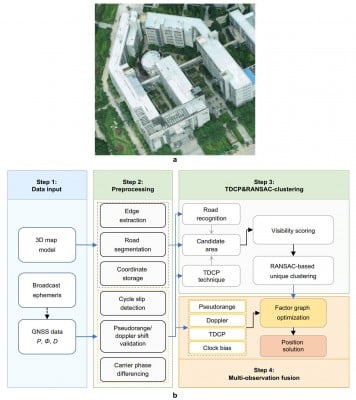
Integrarea observațiilor GNSS și a fazei purtătoare
Cercetătorii au introdus constrângeri de tip time‑differenced carrier phase (TDCP) în scorarea vizibilității sateliților, sporind consistența temporală a poziționării smartphone. În plus, pseudorange‑ul și Doppler‑ul sunt fuzionaţi în același factor graph, oferind o combinație robustă de date absolute și relative.
Map‑matching probabilistic și clustering RANSAC
Strategia de map‑matching probabilistic selectează segmentul de drum cel mai probabil la fiecare epocă, reducând erorile de traversare a străzilor. Un algoritm RANSAC de clustering identifică distribuţia multimodală a soluţiilor, alegând un singur rezultat fizic semnificativ în locul mediei ponderate.
Performanțe experimentale în mediul urban dens
Teste pe teren, desfășurate într-un campus cu obstacole severe, demonstrează îmbunătățiri notabile ale poziționării smartphone:
– 76,7 % din epoci cu eroare orizontală < 3 m;
- 93,1 % din epoci cu eroare < 5 m.
Rezultatele depășesc soluţiile avansate de fuziune multi‑surse GNSS și produc traiectorii mai line și continue.
Provocări viitoare și direcţii de cercetare
Pentru a consolida poziționarea smartphone în orașe complexe, se propun:
– modele 3D urbane cu rezoluție mai mare, pentru predicţii precise ale vizibilităţii satelitare;
– metode globale de achiziție TDCP cu evaluare de încredere, menite să reducă întreruperile semnalului;
– integrarea senzorilor inerţiali, imagine și LiDAR în cadrul factor‑graph, pentru continuitate în perioadele fără GNSS.
În concluzie, combinarea GNSS, carrier phase și hărţi 3D într‑un cadru factor‑graph reprezintă un pas semnificativ spre o poziționare smartphone fiabilă în orașe aglomerate. Pentru dezvoltatorii de aplicații de navigație și serviciile bazate pe locație, monitorizarea evoluţiilor în acest domeniu va permite adoptarea rapidă a soluţiilor mai precise și mai rezistente.


